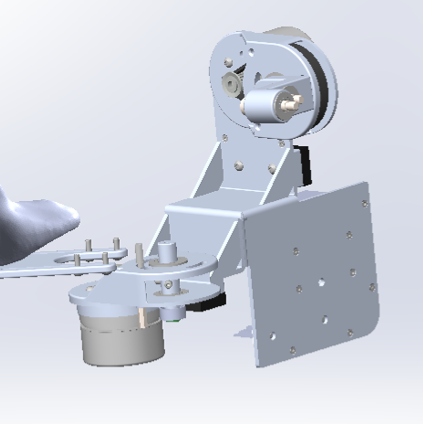
Carpal (Wrist) Joint Iteration 1
Teleoperation Suit for a Container-Unloading Robot
Carpal (Wrist) Joint Iteration 1
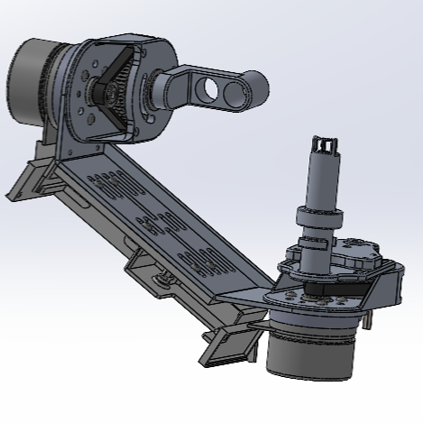
Carpal (Wrist) Joint Iteration 2
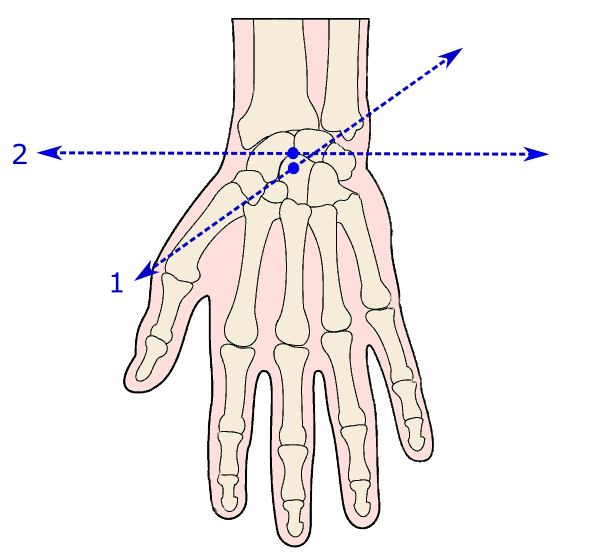
Lines along which the Center-of-Rotation of the Wrist translates
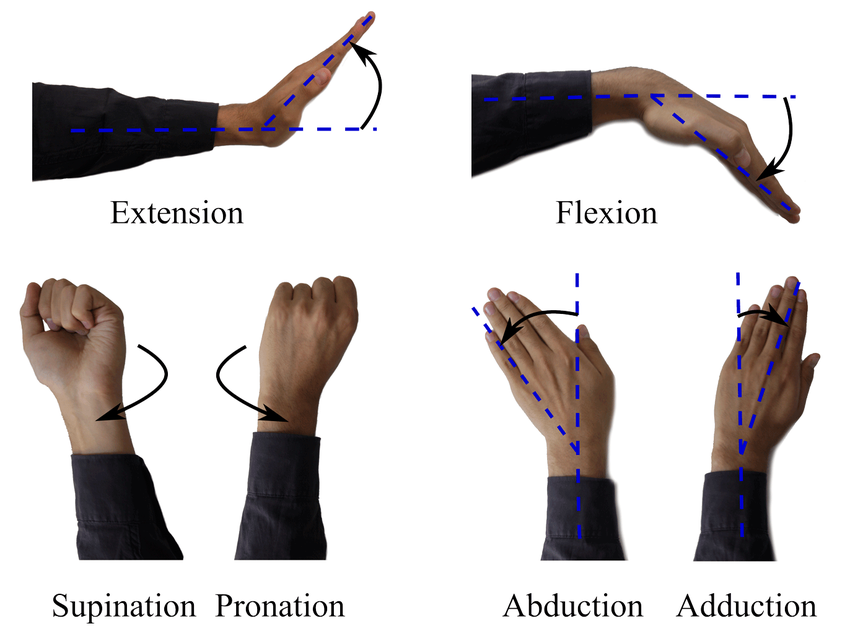
Wrist Modes of Freedom